Despaletizador robótico
Detalles do produto
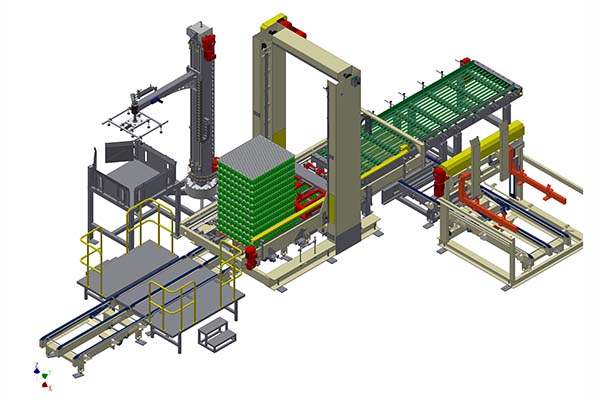
Durante a produción, toda a pila de produtos é transportada por unha cinta transportadora de cadea ata a estación de despaletización, e o mecanismo de elevación elevará toda a paleta ata a altura de despaletización e, a continuación, o dispositivo de aspiración de follas intercalares recollerá a folla e colocaraa no almacén de follas; despois, a pinza de transferencia moverá toda a capa de produtos á cinta transportadora, repetindo as accións anteriores ata rematar a despaletización de toda a paleta e as paletas baleiras irán ao colector de paletas.
Aplicación
Adecuado para a descarga automática de caixas, botellas de PET, botellas de vidro, latas, barrís de plástico, barrís de ferro, etc.
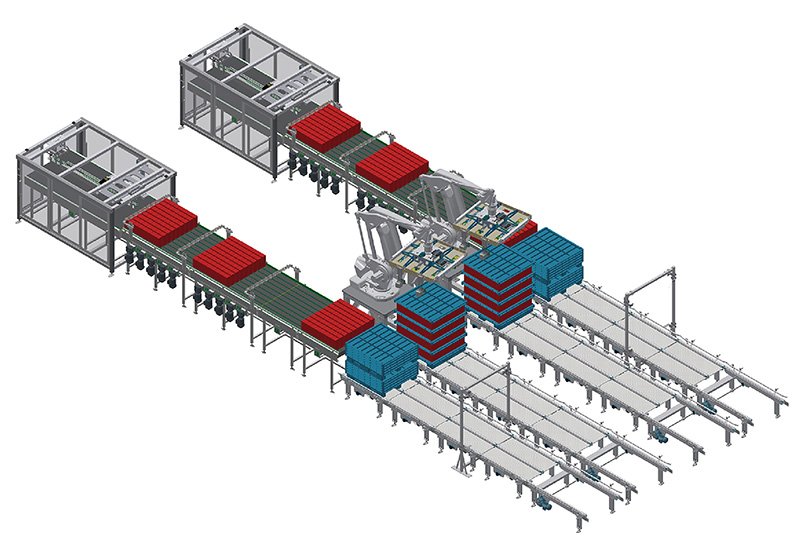
Exhibición do produto


Debuxo en 3D

Configuración eléctrica
| Brazo robótico | ABB/KUKA/FANUC |
| PLC | Siemens |
| Variador de frecuencia | Danfoss |
| Servomotor | Elau-Siemens |
| Sensor fotoeléctrico | ENFERMO |
| Compoñentes neumáticos | SMC |
| Pantalla táctil | Siemens |
| Aparellos de baixa tensión | Schneider |
| Terminal | Fénix |
| Motor | COSER |
Parámetro técnico
| Modelo | LI-RBD400 |
| velocidade de produción | 24000 botellas/hora 48000 tapóns/hora 24000 botellas/hora |
| Fonte de alimentación | 3 x 380 CA ±10 %, 50 Hz, 3 fases + N + PE. |
Máis programas de vídeo
- Despaletizador robótico para botellas con liña de división e fusión
- Despaletizador robótico para caixas con liña de división e unión