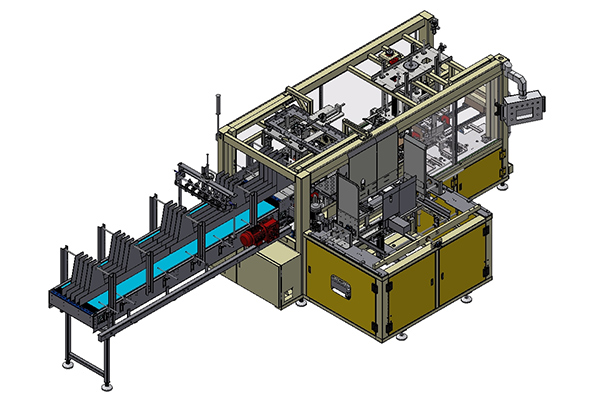
Liña de envasado de caixas con servocoordenadas (con partición de cartón)

A liña de produción de envases consta dun divisor de alta velocidade, unha liña de transporte de produtos, unha liña de transporte de agarre, un robot Hbot, un mecanismo de movemento de dobre eixe, unha liña de transporte de caixas, un mecanismo de detección, unha pinza de particións de cartón, un sistema de alimentación de particións de cartón, unha servocoordenada, unha pinza de botellas e unha valla protectora. O divisor de alta velocidade divide os produtos en varios carrís, mentres que o mecanismo de movemento de dobre eixe acelera o paso dos produtos. Despois de que o produto chegue á estación de partición de cartón, o robot Scar carga a partición de cartón nos produtos dispostos. Os produtos chegan á cinta transportadora de clasificación. Despois, os produtos son recollidos pola pinza e colocados na caixa de cartón, e a cinta transportadora de caixas transporta a caixa que contén o produto cara a fóra.
Deseño completo do sistema de empaquetado

Configuración principal
| Brazo robótico | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| Variador de frecuencia | Danfoss |
| Sensor fotoeléctrico | ENFERMO |
| Pantalla táctil | Siemens |
| Aparellos de baixa tensión | Schneider |
| Terminal | Fénix |
| Pneumática | FESTO/SMC |
| Disco de succión | PIAB |
| Rodamento | KF/NSK |
| Bomba de baleiro | PIAB |
| PLC | Siemens/Schneider |
| HMI | Siemens/Schneider |
| Placa/cadea de cadea | Intralox/Rexnord/Regina |
Descrición da estrutura principal




Máis programas de vídeo
- Empaquetadora de caixas con servocoordenadas para botellas de vidro con división de cartón